Os robôs já fazem parte de nosso cotidiano há décadas. Tudo bem, não no dia a dia exatamente, mas, ao menos, na nossa imaginação. Desde o início do cinema que os filmes já mostravam ideias de robôs que só se tornaram realidade há poucos anos. Na década de 1970, o android C-3PO, do filme Guerra nas Estrelas, conquistou os fãs da franquia e, hoje, é um dos personagens mais queridos. Naquela época, ele já mostrava um nível de inteligência que até hoje não somos capazes de implementar em uma máquina.
O desenvolvimento de robôs que possam imitar o comportamento humano está longe de ser uma tarefa fácil. Além da habilidade de movimentação e flexibilidade, eles devem ser dotados da capacidade de decisão, que é a parte mais difícil.

A revista Science Robotics lançou uma edição especial, dedicada ao aprendizado, que traz três robôs desenvolvidos de forma independente, os quais receberam instruções que os tornam mais ágeis na interação com o mundo real.
O robô que decide como pegar objetos
Como qualquer ser humano, você não tenta pegar uma bola de basquete e uma de tênis da mesma forma. A de basquete você usará as duas mãos, pois sabe que não pode agarrá-la usando somente uma. Já para pegar uma bolinha de tênis, você nunca usaria as duas mãos, pois é completamente desnecessário. Nós conseguimos tomar essas decisões sem nem pensar sobre elas. Isso acontece por causa de nossa vivência. Durante nossa vida, nós aprendemos e retemos conhecimento através de experiências.
Obviamente, com os robôs, as coisas funcionam de forma diferente. No entanto, este robô aqui, criado pela Berkeley, tem uma habilidade parecida com a nossa para agarrar objetos.
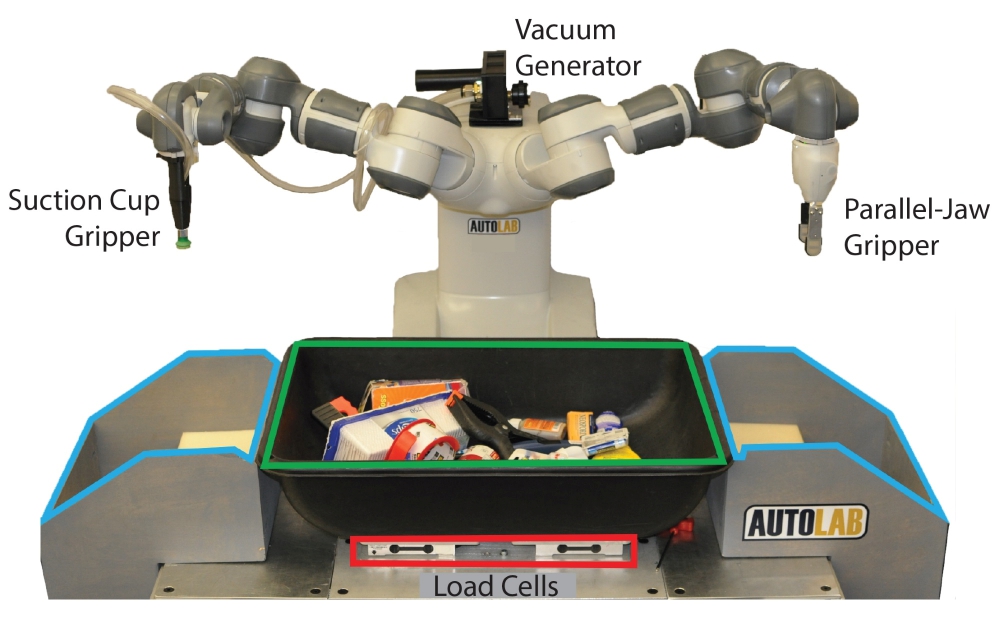
Ele possui dois braços (um com uma pinça e outro com um sistema de sucção) e um software capaz de analisar os objetos e decidir qual dos braços será utilizado para agarrá-los. O processo de tomada de decisão é rudimentar, mas baseado numa rede neural que consumiu milhões de pontos de dados em itens, arranjos e tentativas de capturá-los, o que o torna extremamente eficiente, apesar de simples. Ao perceber que um ursinho de pelúcia não pode ser pego com a ventosa, imediatamente ele tenta a pinça.

Os desenvolvedores disseram que o próximo passo é aprimorar a velocidade da tomada de decisão.
O robô que se levanta de uma queda
Robôs quadrúpedes já são uma realidade. Os modelos da Boston Dynamics são bem conhecidos por andar sobre praticamente qualquer tipo de terreno, se recuperando de escorregões e dos chutes “cruéis” de seus desenvolvedores. Mas, no caso de uma queda, eles não conseguem se levantar do chão na maioria das vezes.
Agora, é hora de conhecermos um robô que pode se levantar de uma queda após ter caído em praticamente qualquer posição.

O ANYmal é um robô que possui uma configuração de pernas que o possibilita realizar movimentos extras, sendo difícil derrubá-lo de forma que ele não se recupere.
A ETH Zurich desenvolveu um software que faz milhares de simulações de movimentos ao mesmo tempo. Embora, nem sempre o que funciona na teoria funciona na prática (devida à aplicação da física), ainda assim, essa possibilidade de simular deu ao robô a capacidade de “aprender” de uma forma muito mais rápida do que se todos os testes tivessem sido realizados manualmente, uma vez que ele pôde criar comportamentos novos (muitas vezes inimagináveis para humanos) e otimizar os que os desenvolvedores já julgavam perfeitos.
Desde que o ANYmal tenha o espaço necessário e suas pernas estejam livres, ele pode se recuperar de praticamente qualquer situação de queda, e utilizando, basicamente, a mesma técnica.
O robô que separa objetos por associação
Nós, seres humanos, somos capazes de seguir instruções. Uma vez aprendidas, começamos a desempenhar diferentes funções em nosso dia a dia, de forma automatizada.
Este robô “cognitivo visual”, criado Miguel Lázaro-Gredilla e seus colegas na Vicarious AI, pode separar objetos por associação de cores e formas. Apesar de primitivo, a ideia é promissora e abre espaço para novas ideias, principalmente se imaginarmos uma situação de linha de montagem numa fábrica qualquer.
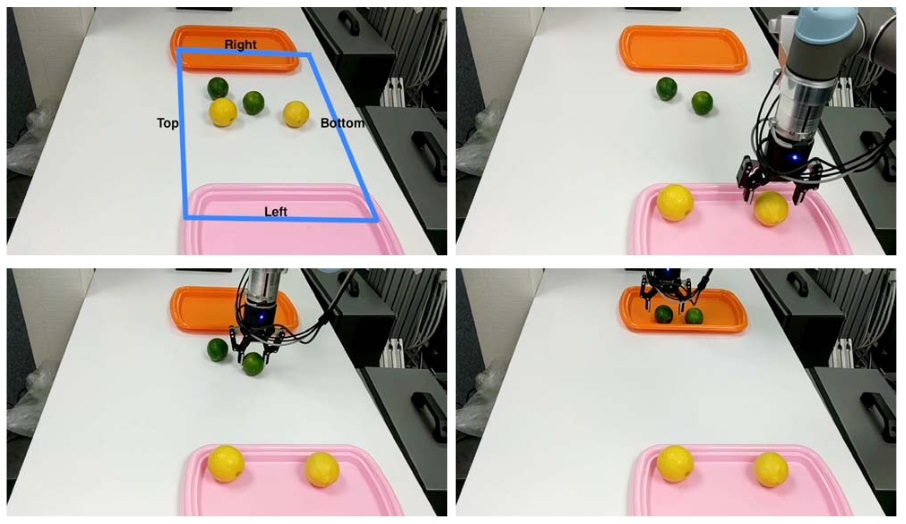
Seguindo esse direcionamento, podemos imaginar que, um dia, um robô como este poderá montar móveis inteiros sozinho, ao reconhecer as peças pela forma, tamanho, textura, cor e peso.